一文了解一致性哈希
前言
一致性哈希是一种特殊的哈希算法,它的核心思想是在解决分布式环境下,Hash表在动态扩缩容时节点重新映射与大量数据迁移的问题。主要的应用场景是:对于有状态服务等场景,需要根据特定的key路由到相同的目标服务机器上进行处理的场景。
一般情况下��我们会使用Hash表的方式,以key-value的方式来做数据的存储。但是,当数据量比较大的情况下,我们会把数据存储到多个节点上,然后通过哈希取模的方式来决定把当前的key存储到哪个节点。但是这种方式有个很明显的问题,就是当存储的节点增加或者减少的时候,原本的映射关系就会发生变化,也就是对于所有的数据需要按照新的节点数量再重新映射一遍,这样就涉及了大量的数据迁移和重新映射的问题,它的代价很大。而一致性哈希算法,就是用来优化这样的动态变化的场景的一种算法。
一致性哈希算法的评判指标:
- 平衡性:不同key的哈希结果分布均衡,尽可能的均衡地分布到各节点上。
- 单调性:当有新的节点上线后,系统中原有的key要么还是映射到原来的节点上,要么映射到新加入的节点上,不会出现从一个老节点重新映射到另一个老节点。
- 分散性:当上游的机器看到不同的下游列表时(在上线时及不稳定的网络中比较常见), 同一个请求尽量映射到少量的节点中。
- 服务器负载均衡:负载主要是从服务器的角度来看,指各服务器的负载应该尽量均衡。 一致性哈希算法的关键特征在于: 不要导致全局重新映射, 而是要做增量的重新映射。
实现
本文将介绍三种一致性哈希算法的实现,代码:demo-projects/consistent-hash at master · straicat/demo-projects
哈希环法
哈希环法是最常用、最经典的一致性哈希算法,也叫割环法。这个算法易于理解、应用广泛,实现了最小化的重新映射。
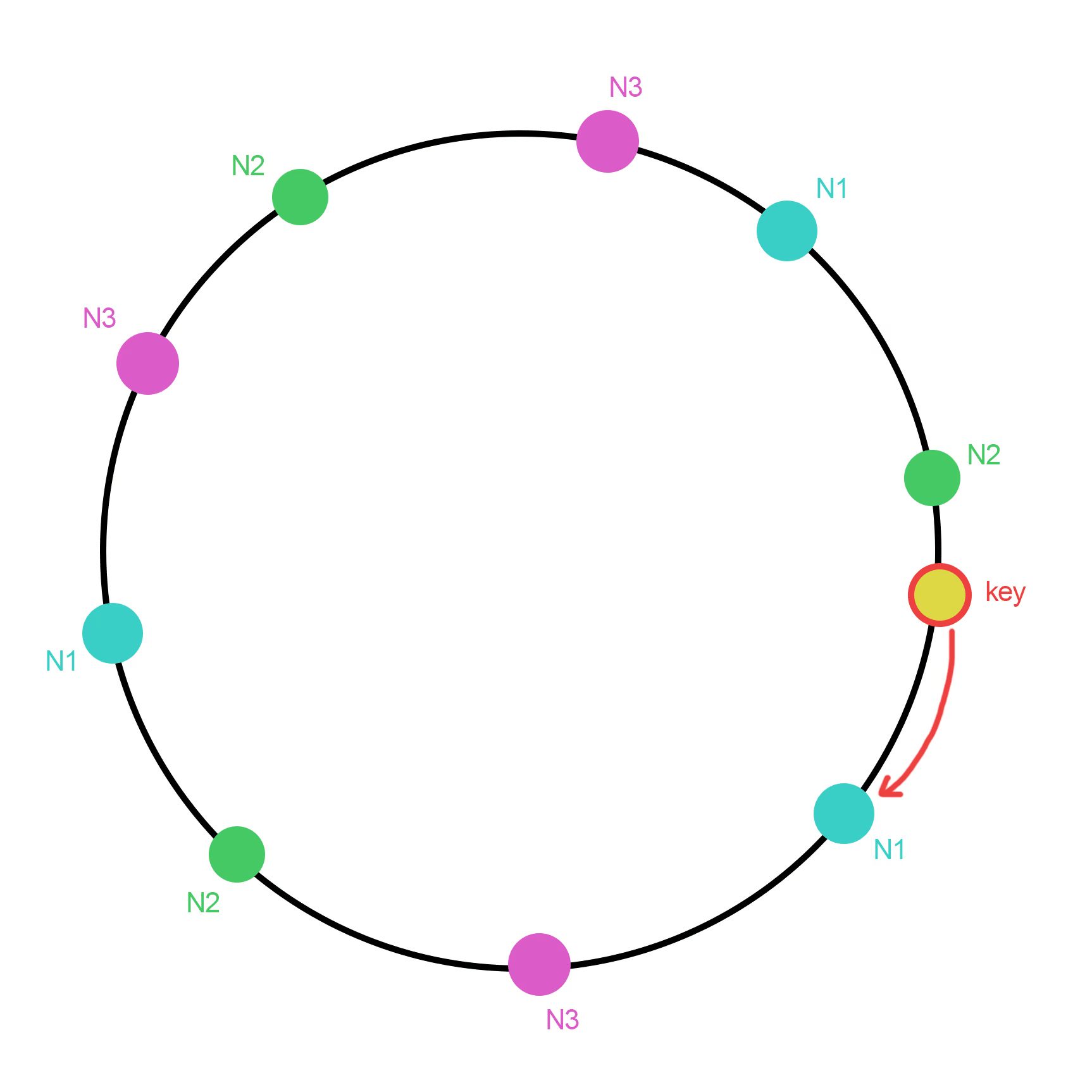
哈希环法的思路是:把节点通过Hash后,映射到一个环上,把数据也通过Hash映射到环上,然后按顺时针方向查找第一个Hash值大于等于数据的Hash值的节点,该节点即为数据所分配到的节点。
哈希环法的映射结果不是很均匀,为了提升均衡性,可以引入虚拟节点(或者叫影子节点)。虚拟节点越多,映射结果的分布越均匀,可以降低真实节点之间的负载差异。虚拟节点不仅提高了结果的均匀性,也能实现加权映射。但是,虚拟节点增加了内存消耗和查找时间。设节点数为n,每个节点有k个虚拟节点,内存消耗:,查找时间:。
该算法的核心代码:
public Node get(String key) {
Long hash = hasher.hash(key);
SortedMap<Long, Node> subMap = vNodes.tailMap(hash);
if (!subMap.isEmpty()) {
return subMap.get(subMap.firstKey());
}
return vNodes.get(vNodes.firstKey());
}
跳跃一致性哈希
跳跃一致性哈希 ( Jump Consistent Hash ) 是 Google 于2014年发布的一个极简的、快速的一致性哈希算法:[1406.2294] A Fast, Minimal Memory, Consistent Hash Algorithm
原论文中给出的算法的C++表示:
int32_t JumpConsistentHash(uint64_t key, int32_t num_buckets) {
int64_t b = -1, j = 0;
while (j < num_buckets) {
b = j;
key = key * 2862933555777941757ULL + 1;
j = (b + 1) * (double(1LL << 31) / double((key >> 33) + 1));
}
return b;
}
设n为节点数,k是要映射的key,是k映射的结果,也就是映射的节点编号。
- 当n=1时,因为只有一个节点,所以必然映射到该节点,也就是
- 当n=2时,此时有两个节点,k映射到这两个节点的概率都是1/2。于是,利用k生成[0,1)的随机数,若该数小于1/2,则k映射到节点1,否则保持在原节点0
- 当n=3时,此时有三个节点,k映射到这三个节点的概率都是1/3。于是,利用k生成[0,1)的随机数,若该数小于1/3,则k映射到节点2,否则保持在原节点。也就是k有1/3的概率映射到节点2,而有2/3的概率保持在原节点,而原节点有2个,也就是保持在0、1号节点的概率都是1/3。
- 以此类推,当节点数为n时,利用k生成[0,1)的随机数,若该数小于1/n,则k映射到节点n-1,否则保持在原节点。
需要注意的是,k一旦确定,随机序列就确定了,也就是以k作为随机数种子,之后的循环就是在遍历一个确定的序列,这样k的映射结果是唯一确定的。
但是,上述算法存在一个问题:当n较大时,k映射到新节点的概率很低,也就是在大部分循环中k是保持在原节点。那么,要怎么优化呢?
假设b是k最后一次映射到新节点的节点编号,此时的节点数为b+1。
- 当增加1个节点时,节点数变为b+2,此时k保持在原节点的概率是
- 当再增加1个节点时,节点数变为b+3,此时k保持在原节点的概率是
- 假设节点数变为j+1时,k映射到新节点j。也就是,k最后一次保持在原节点时节点数为j,保持在原节点的概率是 那么,k连续保持在原节点直到节点数增加到j+1才映射到新节点j的概率是:
如此,上述算法就可以进行优化:当k映射到新节点b后,利用k生成[0,1)的随机数�,设节点数为j+1,也就是j是此时的新节点,若该随机数小于,那么说明k映射到新节点j。设r为生成的随机数,要满足,那么,也就是j最多移动到向下取整。
跳跃一致性哈希算法精妙,在执行速度、内存消耗和映射均匀性上都比经典的哈希环法更好。但是,由于跳跃一致性哈希采用编号来标识节点,所以无法自定义节点编号,并且只能在尾部增删节点。
Maglev一致性哈希
Maglev一致性哈希算法来自Google在2016年发布的一篇论文:Maglev: A Fast and Reliable Software Network Load Balancer – Google Research ,介绍了网络负载均衡器Maglev所使用的一致性哈希算法。
Maglev一致性哈希的思路如下:
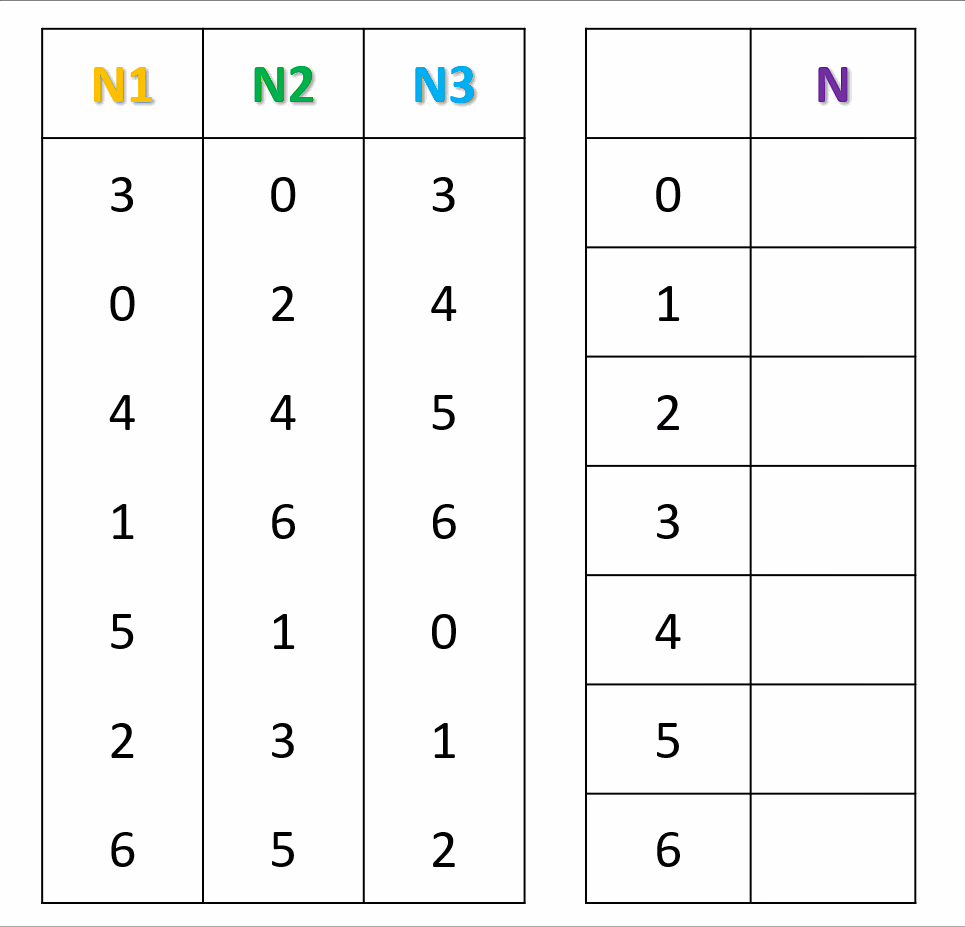
对于每一个节点,生成一个偏好序列。按照节点次序,将节点填入结果查找表中编号为偏好序列中的数字的位置。若编号已被占用,则使用偏好序列中的下一个数字再试。按照上面的方法,直到结果查找表填满。在计算key所映射的节点时,将key进行Hash,然后直接在查找表中查找即可。
怎么样生成偏好序列呢?
取两个无关的哈希函数和,假设节点的名称是x,每个偏好序列的长度是M,先计算offset和skip:
对于偏好序列中的第j个数,其值为:
也可以直接采用一个随机序列来生成偏好序列,只要生成的偏好序列尽量随机、均匀即可。
另外,M必须是个质数,可以减少哈希值的聚集和碰撞,让分布更为均匀。
Maglev一致性哈希生成偏好序列的Java实现:
private void generatePermutation() {
for (int i = 0; i < N; i++) {
String name = nodes.get(i).getName();
long offset = h1(name) % M;
long skip = h2(name) % (M - 1) + 1;
int[] row = new int[M];
for (int j = 0; j < M; j++) {
row[j] = (int) ((offset + j * skip) % M);
}
permutation.add(row);
}
}
Maglev一致性哈希查找表填表过程Java实现:
private void populate() {
int[] next = new int[N];
entry = new int[M];
for (int j = 0; j < M; j++) {
entry[j] = -1;
}
int n = 0;
while (true) {
for (int i = 0; i < N; i++) {
int c = permutation.get(i)[next[i]];
while (entry[c] >= 0) {
next[i]++;
c = permutation.get(i)[next[i]];
}
entry[c] = i;
next[i]++;
n++;
if (n == M) {
return;
}
}
}
}